Multi-LiDAR Fusion with Translation and Rotation
with Python, ROS-Noetic, Ubuntu
By Shokhrukh Miraliev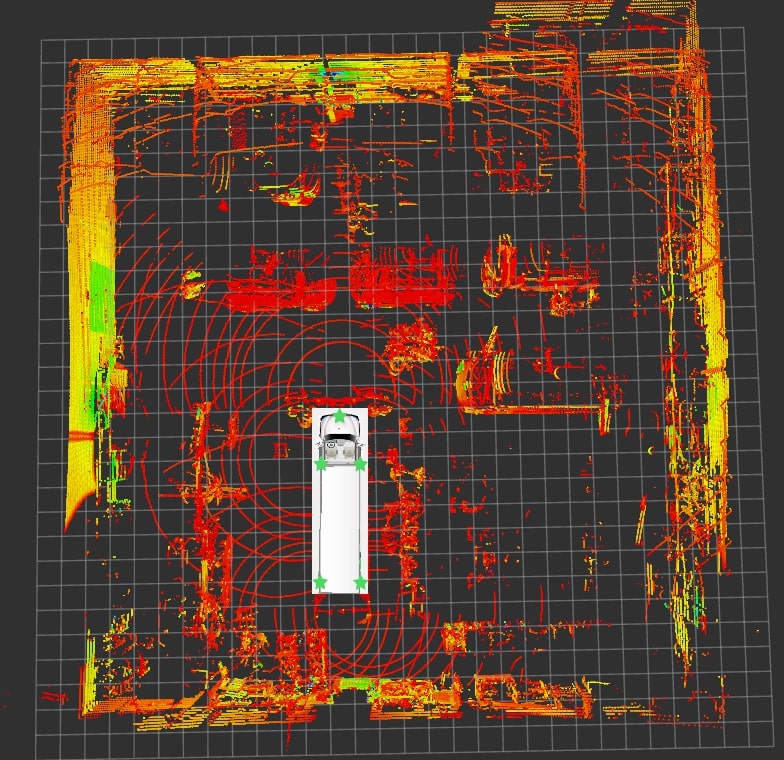
This repository provides a comprehensive framework for fusing data from multiple Lidar sensors while incorporating translations within the ROS (Robot Operating System) environment, specifically tailored for Ubuntu 20.04.
[Read More]
